佳鴻威與東莞某機械設備廠建立五軸機械手合作
發(fā)布者:深圳市佳鴻威科技有限公司 發(fā)布時間:2015-04-04
佳鴻威與東莞某機械設備廠建立五軸機械手合作
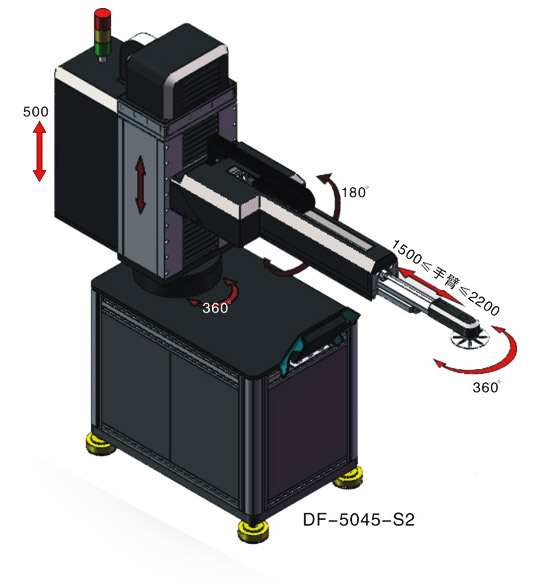
根據(jù)合作規(guī)劃2015年開發(fā)一種五軸機械手���。其主要特征肩機構(gòu)與固裝在固定座上的腰機構(gòu)的減速器軸一體固裝實現(xiàn)肩機構(gòu)與固定座減速器軸的徑向擺動�����,肘機構(gòu)����、腕機構(gòu)分別實現(xiàn)肩機構(gòu)與肘機構(gòu)�����、肘機構(gòu)與腕機構(gòu)之間的相對擺動�����,爪機構(gòu)安裝在腕機構(gòu)的錐齒輪軸上并通過安裝在腕機構(gòu)減速器上的一對與爪機構(gòu)的錐齒輪的嚙合��。本實用新型結(jié)構(gòu)簡單,功能全面�,整機的可靠性、穩(wěn)定性和準確性比較好��,可完美地替代現(xiàn)有的機械手��,適用于焊接�����、裝配��、加工等工業(yè)系統(tǒng)使用����。五軸機械手由電機、減速器��、皮帶輪機構(gòu)�����、鏈輪機構(gòu)等傳動構(gòu)件 驅(qū)動��,其特征在于:機械手包括腰機構(gòu)�����、肩機構(gòu)、肘機構(gòu)����、腕機構(gòu)、爪機構(gòu)五 級傳動部分��,其中肩機構(gòu)與固裝在固定座上的腰機構(gòu)的減速器軸一體固裝實現(xiàn) 肩機構(gòu)繞固定座上腰機構(gòu)的減速器軸的周向擺動�����,肘機構(gòu)�����、腕機構(gòu)分別安裝在 肩機構(gòu)內(nèi)�、肘機構(gòu)內(nèi)的減速器上實現(xiàn)肩機構(gòu)與肘機構(gòu)���、肘機構(gòu)與腕機構(gòu)之間的 相對擺動�,爪機構(gòu)安裝在腕機構(gòu)的錐齒輪軸上并通過安裝在腕機構(gòu)減速器上的 一對與爪機構(gòu)的錐齒輪的嚙合實現(xiàn)爪機構(gòu)的擺動或者轉(zhuǎn)動��。
佳鴻威服務熱線:0755-28916839


.png)





